Generation of vehicle trajectory data for all vehicles driving in a target section by image sensing
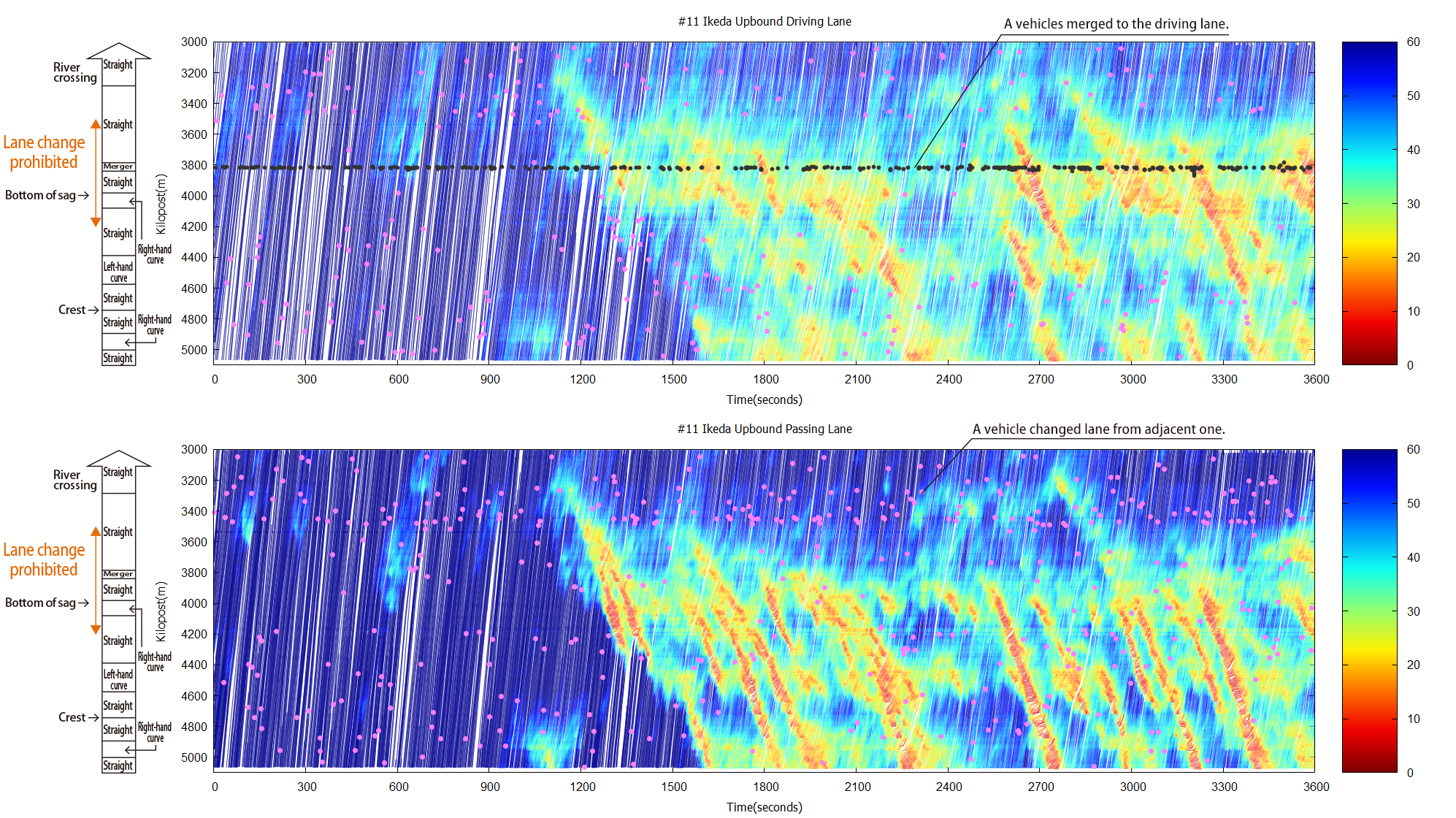
The vehicle behavior, in 0.1 second intervals, for all vehicles driving in target sections that span multiple kilometers are turned into trajectory data over a long period of time
The vehicle location data can be input into a virtual environment
By inputting the vehicle location data included in the vehicle trajectory data into a virtual environment, it is possible to visualize the present traffic conditions from multiple perspectives.

(bottom left: from a merging car, right: from a driving car)
Vehicle trajectory data with various traffic events and related information are compiled into a database
Vehicle trajectory data is compiled into a database with vehicle length information obtained through image sensing and road surface information for the vehicle location. ( see database configuration)